时空图卷积网络:用于交通预测的深度学习框架
交通预测
图结构的交通时序数据:对时间 t 有图 $G_t = (V_t, E, W)$,其中 $V_t$ 是点集,在不同时刻有不同的值,E 是边集,W 是权重矩阵。
交通预测是指在已知之前 M 个交通观测的情况下,预测未来 H 个时间步后最可能的交通指标。
即已知 W,由 $v = (v_{t-M+1}, \cdots, v_t)$ 估计 $v_{t+H}$。
已有方法
在本文之前,对交通流的中长期(间隔超过 30 分钟)预测方法:
- 动态建模。如微分方程
- 计算量大
- 严重依赖于专家建模,不恰当的假设与简化都会影响模型效果
- 数据驱动
- 经典统计。如 ARIMA
- 忽略了时空上的关联
- 机器学习
- 经典统计。如 ARIMA
由于交通流高度的非线性与复杂性,传统方法难以满足中长期预测任务的需求,它们通常也忽略了空间上的关联性。
时空图卷积网络(Spatio-Temporal Graph Convolutional Networks, STGCN)
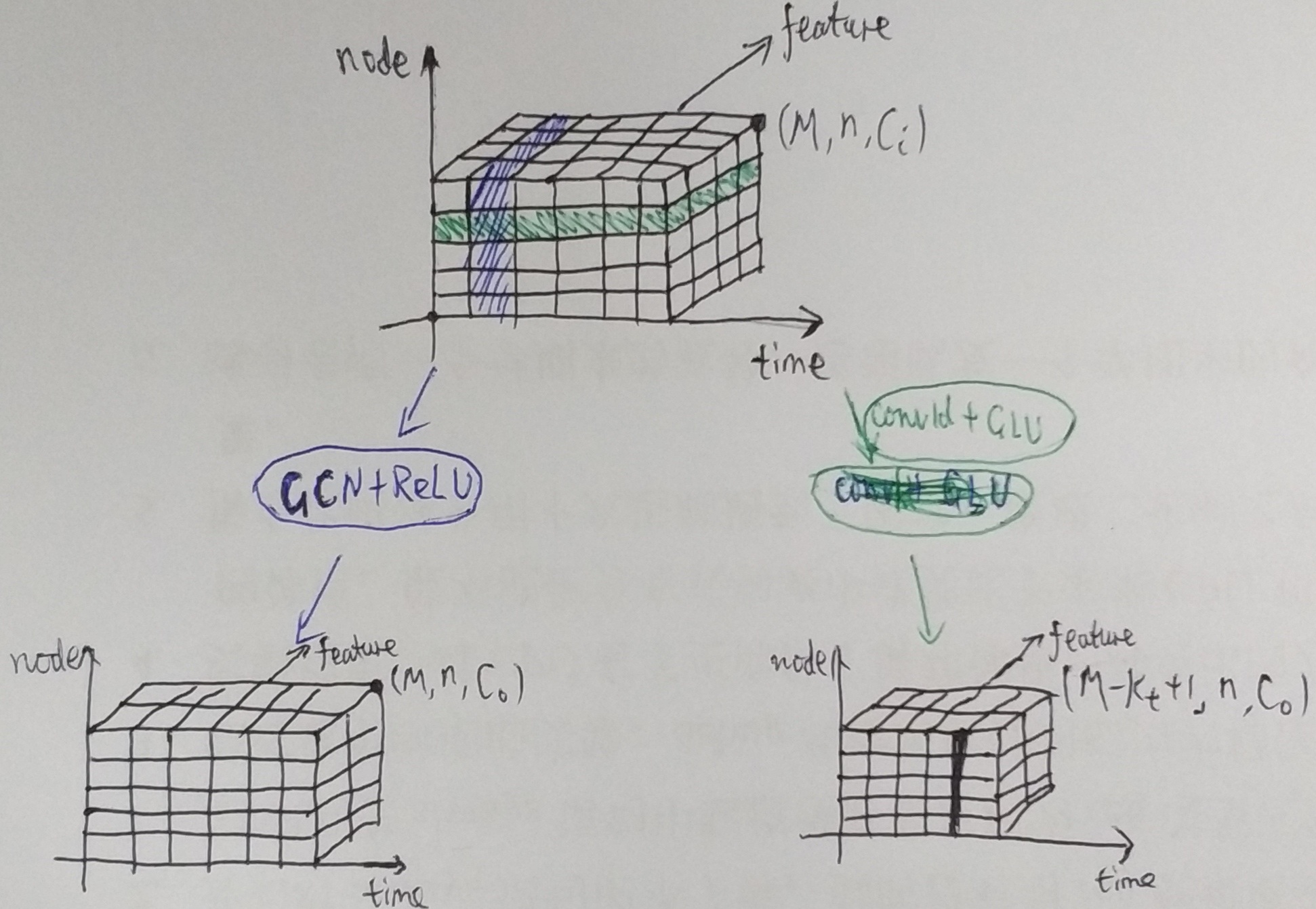
空间图卷积与门控时序卷积
-
空间图卷积
- 就是逐时间帧做图卷积
- 作者分别用了 ChebNet 及其一阶近似(也就是 GCN)做图卷积
- 激活层 ReLU(x) = max(0, x)
-
门控时序卷积
- 就是逐节点做一维卷积
- 每个通道的卷积核大小为 $K_t \times 2C_o$,无 padding,因此变换后时间帧会减少
- 激活层 GLU([x, y]) = $x \otimes \sigma(y)$
整体架构
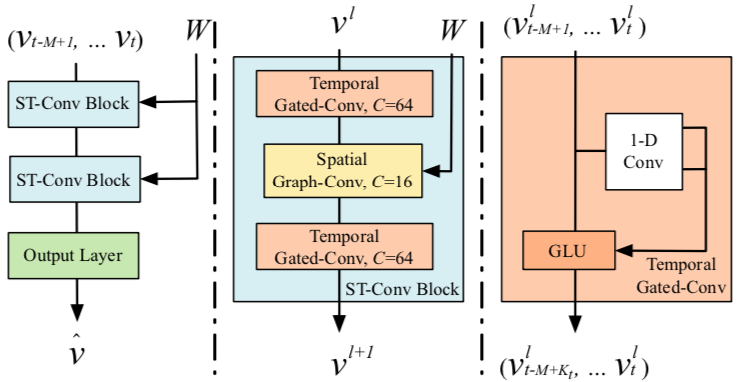
- ST-Conv Block 由两个门控时序卷积夹一个空间图卷积构成
- 每个 ST-Conv Block 后都有一层 Layer Normalization $$y = \frac{x - E[x]}{\sqrt{D[x] + \epsilon}} \cdot \gamma + \beta$$
- Output Layer 是一个全连接层,输出目标时刻的隐状态
- Temporal Gated-Conv 中有一条直连边,原文提到用了 residual connection,但卷积后形状已经变了,按理应该没法直连
实验设置
数据
- 用了两个真实的数据集:
- 北京东四环 BJER4
- 加州公路系统 PeMSD7
- 从中随机抽了大、小两个规模的子集,名为 PeMSD7(L) 和 PeMSD7(M)
- 仅使用工作日的数据
- 用观测站之间的距离构造权重矩阵:距离越近,两者边的权重越大(低于一定值则设为 0,认为不相连)
误差度量
- Mean Absolute Errors, MAE
- Mean Absolute Percentage Errors, MAPE
- Root Mean Squared Errors, RMSE
基线
- HA:历史均值
- LSVR:线性回归
- ARIMA:时间序列模型
- FNN:前向神经网络
- FC-LSTM:全连接的 LSTM
- GCGRU:看名字应是时间轴上使用了 GRU,其它方面与 STGCN 类似
模型设置
- STGCN(Cheb):图卷积使用 3 阶 ChebNet 的 STGCN
- STGCN(1st):图卷积使用 GCN 的 STGCN
实验结果
误差对比
BJER4 的结果类似,这里就不放了。
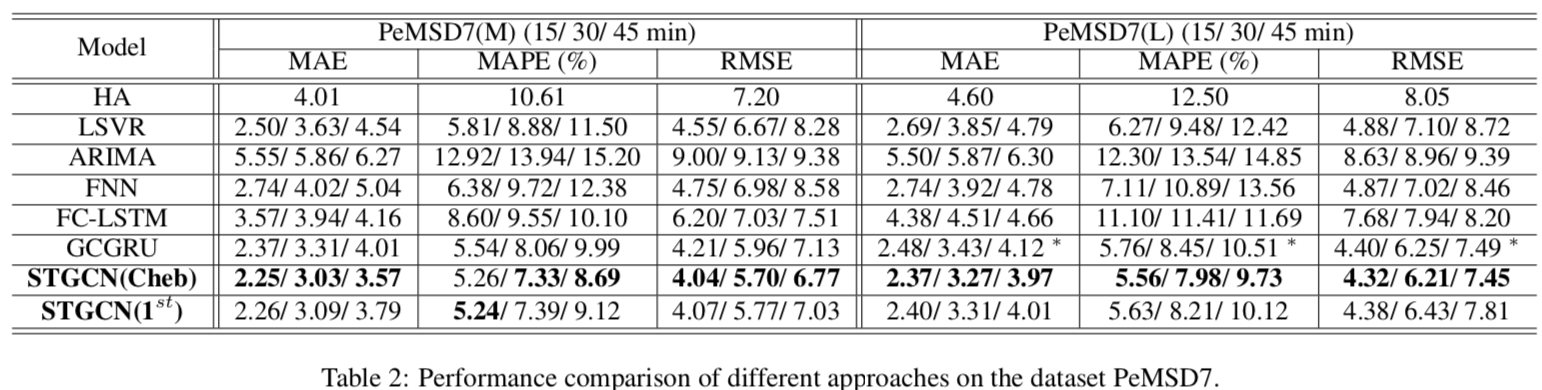
- GCGRU 的部分结果带 *,是因为训练时内存占用过高(RNN 的问题),Batch Size 减小了一半,与其它实验设置有所不同。
- STGCN 充分利用了空间信息
- 这使得 STGCN 相比通常利用不上空间信息的传统方法(比如表现最差的 ARIMA)表现要更好
- 另一方面,PeMSD7 的传感器网络比起 BJER4 要更复杂,空间信息更多,因此 STGCN 的效果在 PeMSD7 上比 BJER4 更显著
高峰预测
部分方法对早晚高峰的预测情况
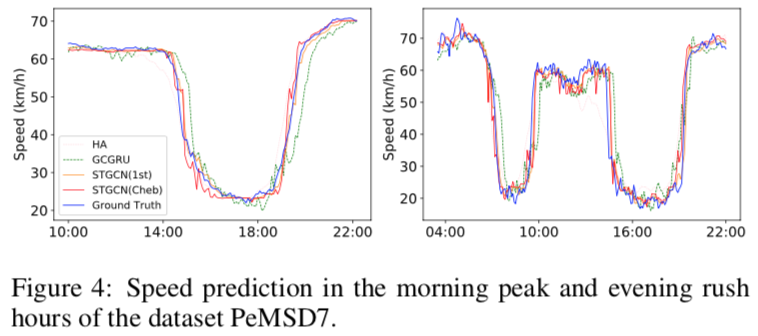
GCGRU 因为基于 RNN(GRU),历史数据影响较大,对于预测任务有更高的时滞。
速度对比
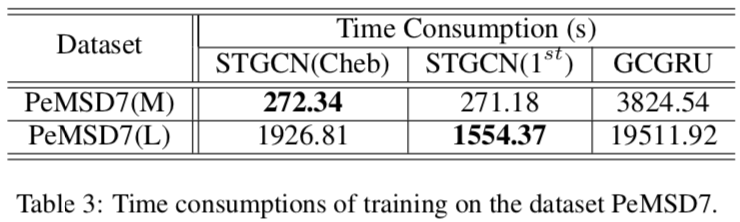
- RNN无法并行,比较耗时,这也是作者在时间轴上使用 CNN 的主要原因
- GCN 在大数据集时比 ChebNet 更快,同时效果相当
Page Not Found
Try to search through the entire repo.