神经常微分方程
- Hinton 创建的向量学院
- 2018 NIPS 最佳论文奖
常微分方程(Ordinary Differential Equation, ODE)及其数值解
本文研究以下带初值 h(0) 的 ODE $$\frac{dh(t)}{dt} = f(t, h(t))$$
对 ODE 积分有 $$h(t) = h(s) + \int_s^t f(x, h(x)) dx$$ 由积分中值定理 $$h(t) = h(s) + (t - s) \cdot f(x, h(x)), x \in [s, t]$$
写成递推式 $$h(t + \Delta t) = h(t) + \Delta t \cdot f(x, h(x))$$ 如果能估计出各步的 $f(x, h(x))$,由 h(0) 开始就可以逐步推出 h(T)
此外,如果步长为负则得到反向的递推公式 $$h(t - \Delta t) = h(t) - \Delta t \cdot f(x, h(x))$$ 可由 h(T) 逐步推出 h(0)
ODE Solver 举例
各种 ODE Solver 对 $f(x, h(x))$ 进行了不同的估计:
- Euler 法:$f(x, h(x)) \approx f(s, h(s))$
- 中点法(RK2):$f(x, h(x)) \approx \frac{1}{2} \cdot (f(s, h(s)) + f(t, h(s) + (t - s) \cdot f(s, h(s))))$
此外还有 Runge-Kutta (RK4) 和 Adams-Bashforth 等。
以 Euler 法为例,当步长 $\Delta t$ 较小时,可以用 $$h(t + \Delta t) \approx h(t) + \Delta t \cdot f(t, h(t))$$ 从 h(t) 的初值开始一步步估算出终值。
伪码如下(步长不必固定):
for dt in dts:
h += dt * f(t, h)
t += dt
NeuralODE
注意到残差网络、RNN 网络的 decoder、归一化流的模型与 Euler 法有相同的形式: $$h_{t+1} = h_{t} + f(h_t \theta_t)$$
digraph {
label="ODE Solver";
rankdir=LR;
node [shape=none];
h0 [label="h(0)"]; ht [label="h(T)"];
subgraph cluster_ode {
label="t=0";
dot [label="."];
f [shape=box, label="f * dt"];
plus [shape=circle, label="+"];
dot -> f [label="h, t"];
f -> plus;
dot -> plus [constraint=false];
}
h0 -> dot;
t1 [label="...", shape=none];
tt [label="t=T", shape=box];
plus -> t1 -> tt -> ht;
}
digraph {
label="两层 ResNet 的前向计算";
rankdir=LR;
node [shape=none];
x; y;
subgraph cluster_l1 {
label="ResNet Layer 1";
dot1 [label="."];
conv1 [shape=box, label="conv"];
node [shape=circle];
plus1 [label="+"];
relu1 [label="σ"];
dot1 -> conv1 -> plus1 -> relu1;
dot1 -> plus1 [constraint=false];
}
l2 [shape=box, label="ResNet Layer 2"];
x -> dot1;
relu1 -> l2;
l2 -> y;
}
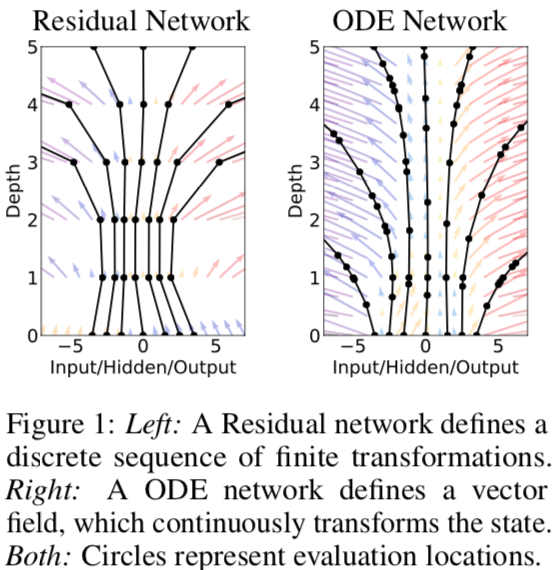
假设这些离散的网络层($\Delta t=1$)之间还存在无穷多的层,使步长 $\Delta t$ 可以无穷小以致 t 连续,则模型可写成 ODE 的形式:
$$\frac{dh(t)}{dt} = f(h(t), t, \theta)$$
输入层是这个 ODE 的初值 h(0),输出层就是解 h(t) 在 t=T 时的值 h(T)。
而本身的模型就是这个带初值常微分方程定义的连续网络的离散化。
建模为 ODE 的好处:
- 少量参数就可以建模复杂的动力系统
- 网络深度是自适应的,通过数值误差的阈值进行控制,可在精度与速度之间权衡
- 中间任意连续时刻的隐状态都是可知的
参数学习:伴随法(Adjoint Method)
用普通的误差反向传播也可以学习模型参数,但当中间的时间步很多时,需要保存大量的中间梯度,造成内存问题,数值误差的影响也不受控。
于是作者通过伴随法的应用,绕过 ODE Solver 得到了误差对参数的梯度,并且达到了常数级的空间复杂度。
定义伴随状态(Adjoint State) $$a_g(t) = \frac{\partial{L}}{\partial{g(t)}}$$
由链式法则 $$ a_g(t) = \frac{\partial{L}}{\partial{g(t + \epsilon)}} \cdot \frac{\partial{g(t + \epsilon)}}{\partial{g(t)}} = a_g(t + \epsilon) \cdot \frac{\partial{g(t + \epsilon)}}{\partial{g(t)}}$$
有 $$\begin{aligned} \frac{da_g(t)}{dt} &= \lim\limits_{\epsilon -> 0^+} \frac{a_g(t+\epsilon) - a_g(t)}{\epsilon} \\ &= \lim\limits_{\epsilon -> 0^+} a_g(t+\epsilon) \cdot \frac{\frac{\partial{g(t) - g(t+\epsilon)}}{\partial{g(t)}} }{\epsilon} \\ &= - a_g(t) \cdot \frac{\partial{g'(t)}}{\partial{g(t)}} \end{aligned}$$
令 $g(t) = (h(t), \theta, t)^T$ 代入 $$\begin{aligned} \frac{da_g(t)}{dt} &= - (a_h(t), a_\theta(t), a_t(t)) \cdot \begin{pmatrix} \frac{\partial{h'(t)}}{\partial{h(t)}} & \frac{\partial{h'(t)}}{\partial{\theta}} & \frac{\partial{h'(t)}}{\partial{t}} \\ 0 & 0 & 0 \\ 0 & 0 & 0 \end{pmatrix} \\ &= -( a_h(t) \cdot \frac{\partial{h'(t)}}{\partial{h(t)}}, a_h(t) \cdot \frac{\partial{h'(t)}}{\partial{\theta}}, a_h(t) \cdot \frac{\partial{h'(t)}}{\partial{t}} ) \end{aligned}$$
于是得到了三个 ODE(原文构造了一个增广矩阵按一个 ODE 一起算,这里便于说明拆成了三个 ODE) $$\begin{cases} \frac{da_h(t)}{dt} = - a_h(t) \cdot \frac{\partial{f(h(t), t, \theta)}}{\partial{h(t)}} \\ \frac{da_\theta(t)}{dt} = - a_h(t) \cdot \frac{\partial{f(h(t), t, \theta)}}{\partial{\theta}} \\ \frac{da_t(t)}{dt} = - a_h(t) \cdot \frac{\partial{f(h(t), t, \theta)}}{\partial{t}} \end{cases}$$
对应的最终时刻的值
- $a_h(T) = \frac{\partial{L}}{\partial{h(T)}} $ 可由损失函数的定义计算出
- 作者说“setting $a_\theta(T) = 0$”没说为什么,我猜是因为优化问题最终就是要让损失函数相对参数的梯度为0
- $a_t(T) = \frac{\partial{L}}{\partial{t}} |_T = \frac{\partial{L}}{\partial{h}} \cdot \frac{\partial{h}}{\partial{t}} |_T = a_t(T) \cdot f(h(T), T, \theta)$
于是反向递推可得到损失函数相对于初始时刻的状态、模型参数和时间 t 的梯度 $a_h(0), a_\theta(0), a_t(0)$。
以优化$\theta$为例,记$\alpha = \frac{\partial{L}}{\partial{h(t_N)}}$,$\beta$为学习率,因为
$$\frac{\partial{L}}{\partial{\theta(t_0)}} = \frac{\partial{L}}{\partial{\theta(t_N)}} - \int_{t_N}^{t_0} \alpha \cdot \frac{\partial{f(\theta)}}{\partial{\theta(t)}} dt$$
其中第一项按前面设置是0,$\alpha \cdot \frac{\partial{f(\theta)}}{\partial{\theta(t)}}$可以在使用f(*args).backward(alpha)后通过theta.grad得到,而且很多时候神经网络里的参数都是可以让输出值随便线性调整的(最后一层不是非线性),所以时间间隔具体是多少也不重要,省略了也可以。
监督学习
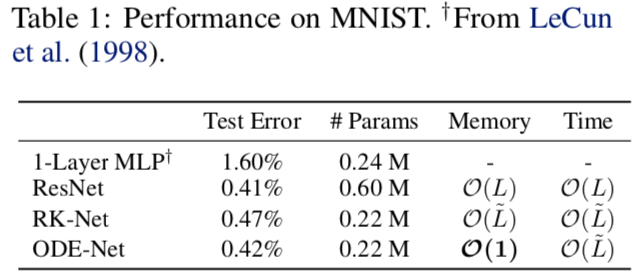
- 用更少参数达到了 ResNet 相似的准确度
- 达到了常数级的空间复杂度
- RK-Net 是用 Runge-Kutta 前向估算 ODE,但优化时仍用的 BP 算法,所以内存还是高
- 时间复杂度都跟网络深度一致,但 ODE-Net 的深度是自适应的,无法直接比较(但后面实验表明 ODE-Net 更快)
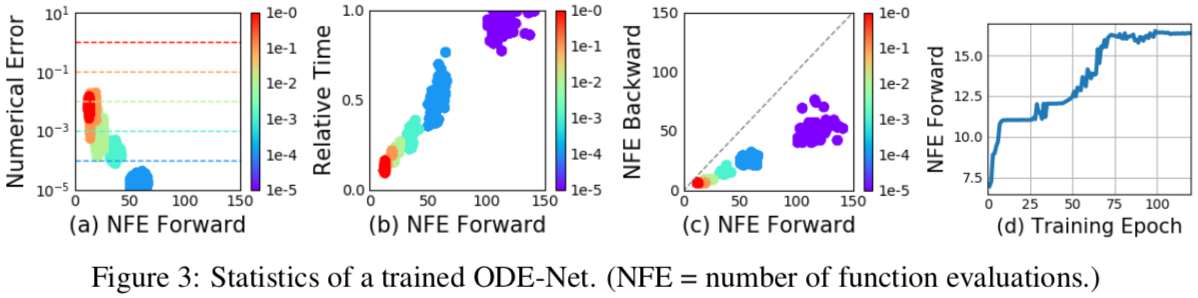
- a 表明 ODE 的数值解的误差阈值与计算量成反比,而计算量与运行时间成正比(b),所以可以训练时减小误差阈值以提高精度,测试时放松阈值以提升速度;
- 反向计算梯度时计算量比前向计算还少一半,作者认为是反向传播时评估节点可能更少
连续型归一化流
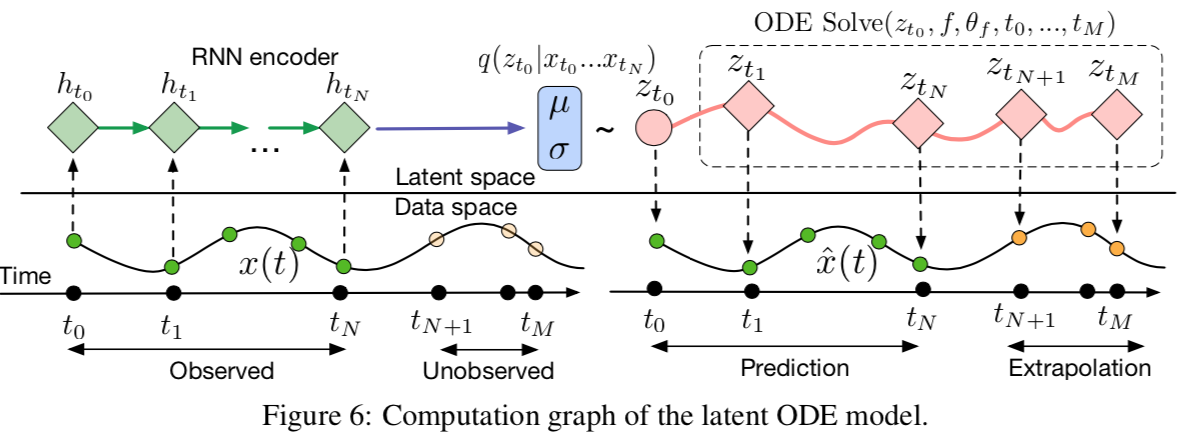
生成时间序列模型
参考资料
Page Not Found
Try to search through the entire repo.