位置感知图神经网络
背景
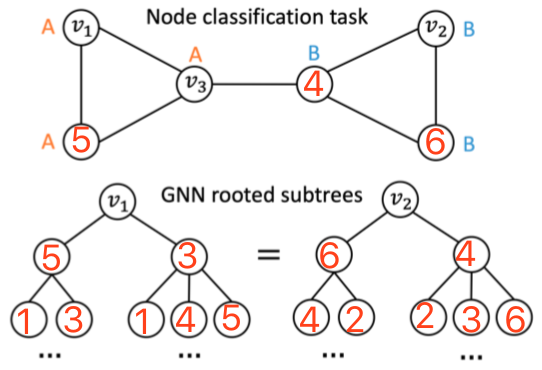
现在的 GNN 方法学到的节点表示依赖于所在邻域的结构,无法捕获更广范围的图的结构。
导致图中两点如果有相同的局部结构,就会学到相同的表示,从表示上无法区分开。
问题定义
- q-结构感知(structure-aware):节点表示由距离 q 以内的节点的表示聚合而来
- 位置感知(position-aware):两个节点在图中的最短距离能由其表示计算出来
- 推论:当且仅当图中不存在 q 步同构的节点对时,q-结构感知表示是位置感知的
- GNN 的问题在于学到的是结构感知的表示而不一定是位置感知的表示
模型
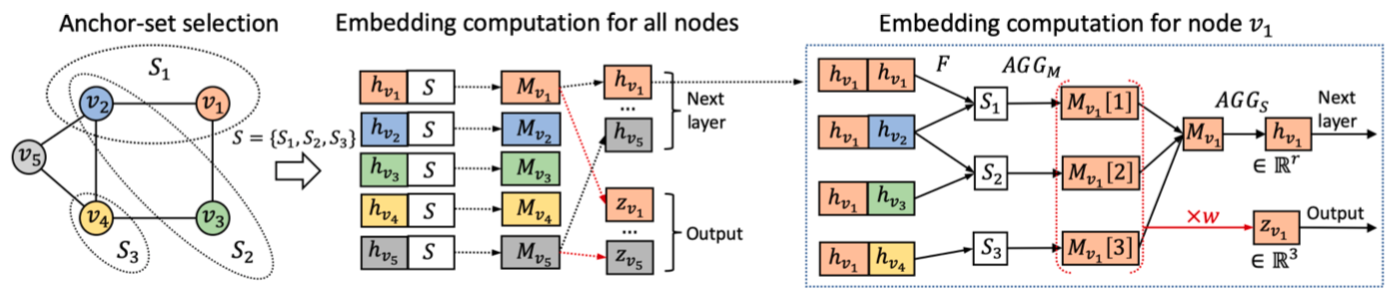
- 每次前传时,随机选多个锚点集(anchor-sets)S
- 对每一点 v 与每一组锚 $S_i$,计算 {$F(v, u) | u \in S_i$},并聚合为向量 M(v, $S_i$)
- v 的各 M(v, $S_i$) 聚合为下一个隐状态 h(v)
- v 的各 M(v, $S_i$) 按行拼接为矩阵 M(v),降维为位置感知表示 z(v)
M(v) 降维为 z(v) 是右乘了一个列向量,相当于 M(v) 的任一行经相同的线性组合成为 z(v) 的一维,所以 z(v) 的每一维对应与一个(且仅一个)锚点集的信息。因此:
- 图中即使有相同邻域结构的节点,在分别与锚点集计算后结果都会不同(类似使用多个卫星进行定位),所以 z(v) 是包含了位置信息的表示
- 如果堆叠 P-GNN,随着下一层锚点集的改变,z(v) 也会失去意义,所以 z(v) 不能往下层传,但另外聚合的 h(v) 可以
实现细节
- $F(v, u) = \frac{1}{1 + d_q(v, u)} [h_v; h_u]$,其中 $d_q(v, u)$ 是 v, u 之间的最短路径,超过 q 则视为 $\infty$
- 两处聚合都用的 mean
关于锚点集的生成
作者在论文中引用了 Bourgain Theorem 来指导锚点集的生成,表明以该定理的证明方式生成 $O(\log^2 n)$ 个锚点集,点 v 与各个锚点集中点的最短距离组成一个映象向量 f(v),则映射前后两点的距离满足 $\frac{1}{\alpha} d(u, v) \le d'(f(u), f(v)) \le d(u, v)$,其中 $\alpha$ 称为 distortion,属于 O(log n)。
作者因为两处聚合都用的拼接与 mean,只能说是这个定理的一个变形而非实现(严格符合定理应该是取一个 min),但可以因此看出作者是想在变换时尽量保持节点的距离信息。
与常规 GNN 的关系
- 常规 GNN 通常可以看作 P-GNN 的特例
- GCN 可以看作每个点作为一个锚点集,F 中使用 $d_1$
- GraphSAGE 可以看作每个点使用了不同的锚点集
- 但每节点的计算复杂度比常规 GNN 高多了:$O(n^2 \log^2 n)$ vs $O(n + e)$
实验
- 在 Grid, Communities, PPI 三个数据集上做 Transductive 的链接预测实验
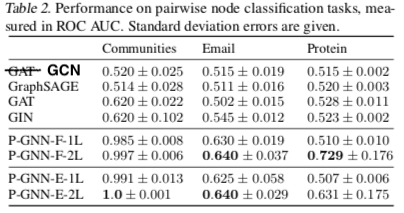
- 在 Communities, Email, Protein 三个数据集上做 Inductive 的节点配对实验
- 衡量指标是 ROC AUC
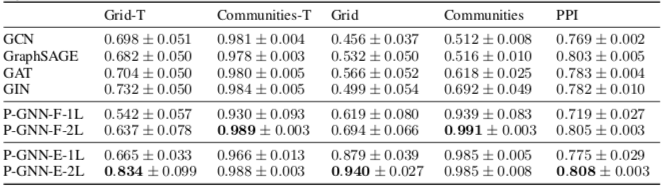
其中 *-T 给节点加入了 one-hot 的特征向量。
Page Not Found
Try to search through the entire repo.