HEAL: 异质开放场景协同感知
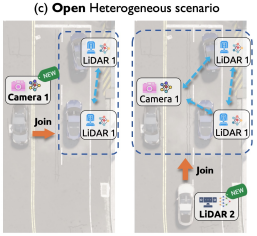
本文研究异质开放场景下协同感知,目标是为已有协同网络持续纳入新出现的异质感知器,进行低耗高质协同感知。
同质场景背景
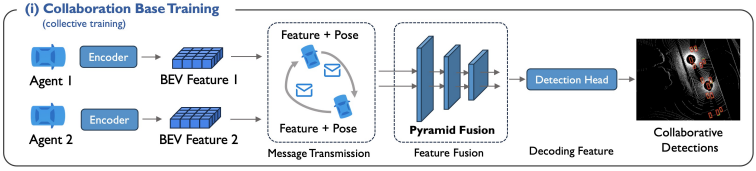
- 各感知器均带一个编码器,将感知数据编码为鸟瞰视角(Bird's Eye View, BEV)特征
- 感知器共享BEV,并变换他人BEV,对齐到自己空间,得到对齐特征
- 对齐特征经融合模型(本文设计了个Pyramid Fusion,略)得到融合特征,再经检测层得到结果
- 使用已有感知器的所有数据训练得到编码器、融合模型、检测层
异质开放场景思路
- 新加入节点时,固定融合模型与检测层,训练出新加入节点的编码器,便可接入网络进行协同感知
数据集
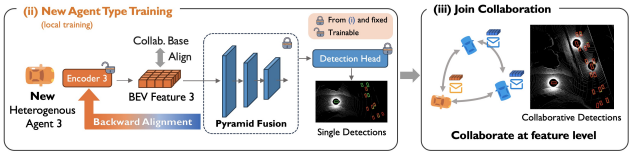
- OPV2V-H:CARLA与OpenCDA模拟得到的数据集,每个时间帧有2~7个感知器,包括不同分辨率的3种LiDAR和7种摄像头
- DAIR-V2X:从一辆车与一个路边单元收集来的真实数据集,两者都装备了一个LiDAR和一个摄像头

CARLA + OpenCDA共同模拟的环境
装备的感知器
需要注意的问题
- 按rebuttal信息,节点加入协同前训练编码器要3小时(参考:初始训练要5小时),因此可能不适用于车联网这种进出频繁的场景
- 从方法本身来看,融合模型与检测层只在初始阶段训练,因此初始化数据充足可能比较重要,实际使用时可配合低频的完整训练
Page Not Found
Try to search through the entire repo.