深度强化学习
强化学习(Reinforcement Learning)
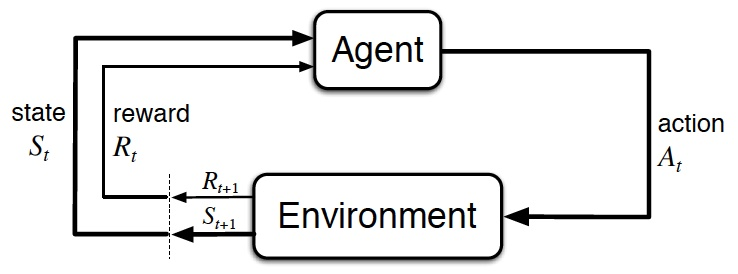
智能体(Agent)按策略 $\pi$ 与环境 E = (S, A, P, R) 不断交互并更新策略,使得累计回报 G 的期望 $E_{\tau}(G)$ 最大。
步(Step)与轨迹(Trajectory)
根据当前状态 $s \in S$ 执行动作 $a \in A$ 后,获得由函>数 R 决定的回报 r 并以概率 P 转移到下一个状态 $s' \in S$,此为一步 (s, a, r, s')。连续的>若干步 $<s_0, a_0, r_1, s_1, a_1, r_2, \cdots, s_{T-1}, a_{T-1}, r_T, s_T>$ 称为轨迹,记>为 $\tau$。
E: 环境(Environment)
通常以马尔可夫决策过程(Markov Decision Process, MDP。将动作和回报考虑在内>的马尔科夫过程)表示。如:
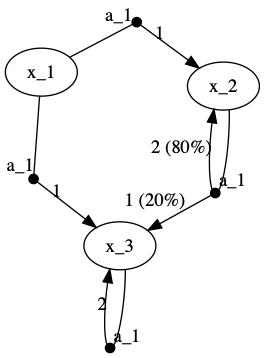
| (state, action) \ (P, R) \ next_state | x_1 | x_2 | x_3 |
|---|---|---|---|
| (x_1, a_1) | (1, 1) | ||
| (x_1, a_2) | (1, 1) | ||
| (x_2, a_3) | (0.8, 2) | (0.2, 1) | |
| (x_3, a_1) | (1, 2) |
E = (S, A, P, R)
- S: 状态空间(State)
- 回合式任务(Episodic Task):存在终止状态(Terminal State)的任务。从开始到终止的一轮交互称为一个回合(Episode)。如下棋。
- 持续式任务(Continuing Task):如无人驾驶。
- A: 动作空间(Action)
- P: 转移概率(Probability) $S \times A \times S \rightarrow [0, 1]$
- R: 回报函数(Reward) $S \times A \times S \rightarrow [R_{\min}, R_{\max}]$
$\pi$: 动作的策略(Policy)
- 确定性策略(Deterministic Policy) $S \rightarrow A$
- 随机性策略(Stochastic Policy) $S \times A \rightarrow [0, 1]$
策略之外的探索
$\epsilon$-贪心:以概率 $\epsilon$ 随机探索,否则按当前策略执行已知的最优动作。
G: 累计回报(Gain)
这里采用 $\gamma$-折扣累计回报:$$G_{\gamma}(t_0) = \sum\limits_{t=0}^{+\infty} \gamma^t r_{t_0+t} = r_{t_0} + \gamma G_{\gamma}(t_0 + 1)$$ 其中 $\gamma$ 称为折扣率
深度 Q 网络(DQN)
Mnih et al. CoRR 2013. Playing atari with deep reinforcement learning.
定义动作值函数 $Q = E(G | s, a)$
基于此可得最优策略 $\pi(s) = \mathop{\arg\max}\limits_{a \in A} Q(s, a)$
学习 Q 函数的目标是使损失函数 $E[(G - Q)^2 | s, a]$ 最小 如果用神经网络 $Q_{\phi}$ 近似 Q,其权重为 $\phi$,损失函数的梯度就是 $-E(G - Q_{\phi} | s, a) \cdot \frac{\partial{Q_{\phi}}}{\partial{\phi}}$
由当前步的交互已知 $<s, a, r, s'>$,由 s' 按策略又可确定下一步动作 $a' = \pi(s') = \mathop{\arg\max}\limits_{a' \in A} Q(s', a')$
故 $EG = r + \gamma E(G | s')$
$= r + \gamma Q(s', \mathop{\arg\max}\limits_{a' \in A} Q(s', a')) = r + \gamma \max\limits_{a' \in A} Q(s', a')$
记 $\delta(s, a) = E[G - Q_{\phi}(s, a) | s, a]$
$\approx r + \gamma \max\limits_{a' \in A} Q_{\phi}(s', a') - Q_{\phi}(s, a)$
则随机梯度下降法中每一步的权重增量为 $\Delta \phi = \alpha \cdot \delta(s, a) \cdot \frac{\partial{Q_{\phi}(s, a)}}{\partial{\phi}}$
DQN 算法
- 执行带探索的策略 $a = \pi(s)$ 得 $<s, a, r, s'>$
- 计算 $\delta = r + \gamma \max\limits_{a' \in A} Q_{\phi}(s', a') - Q_{\phi}(s, a)$
- 更新网络参数 $\phi \mathrel{+}= \alpha \delta(s, a) \frac{\partial{Q_{\phi}(s, a)}}{\partial{\phi}}$
- 更新策略 $\pi(s) = \mathop{\arg\max}\limits_{a \in A} Q(s, a)$
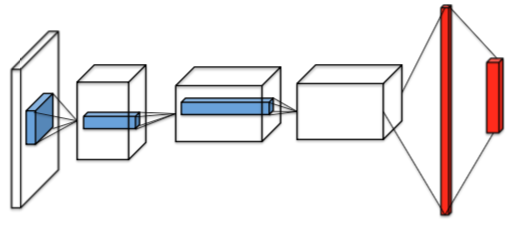
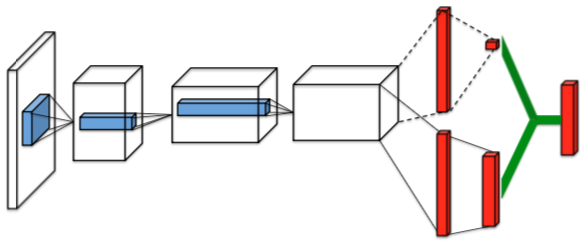
端到端架构
DQN 使用的两个重要技巧
Mnih et al. Nature 2015. Human-level control through deep reinforcement learning.
- Freeze Target Network:Q 在尤其一开始的时候很不稳定,所以实际是用冻结的 Q 估计 G;
- Experience Replay:动一步,反思 n 步。提高数据利用率并并降低数据关联性。
对比回顾 Q-learning
- DQN: $\phi \mathrel{+}= \alpha [r + \gamma \max\limits_{a' \in A} Q_{\phi}(s', a') - Q_{\phi}(s, a)] \cdot \frac{\partial{Q_{\phi}(s, a)}}{\partial{\phi}}$
- Q-learning: $Q(s, a) \mathrel{+}= \alpha [r + \gamma \max\limits_{a' \in A} Q(s', a') - Q(s, a)]$
Actor-Critic 算法(AC)
使用值函数近似解决了连续状态空间的问题,同样地为了解决连续动作空间的问题,可以用神经网络近似 $\pi$,其参数为 $\theta$ 并假设 DQN 估算的 $Q_{\phi}(s, a)$ 与 $\theta$ 无关,下面推导期望回报的梯度:
$\frac{\partial{EG}}{\partial{\theta}} = \frac{\partial{E_{s \sim s_0} E_{a \sim \pi_{\theta}(s)} G}}{\partial{\theta}} = \frac{\partial{E_{s \sim s_0} E_{a \sim \pi_{\theta}(s)} [G - Q_{\phi}(s, a)]}}{\partial{\theta}}$
$\approx \frac{\partial{E_{s \sim s_0} E_{a \sim \pi_{\theta}(s)} \delta(s, a)}}{\partial{\theta}} = E_{s \sim s_0}\int \frac{\partial{\pi(a | s)}}{\partial{\theta}} \delta(s, a) da$
$= E_{s \sim s_0}\int \pi(s | a) \frac{\partial{\log\pi(a | s)}}{\partial{\theta}} \delta(s, a) da$
$= E_{s \sim s_0} E_{a \sim \pi_{\theta}(s)}[\frac{\partial{\log\pi(a | s)}}{\partial{\theta}} \delta(s, a)]$
按梯度上升方向更新策略就能使期望回报更高。
AC 算法:
- 执行带探索的策略 $a = \pi(s)$ 得 $<s, a, r, s'>$
- 计算 $\delta = r + \gamma \max\limits_{a' \in A} Q_{\phi}(s', a') - Q_{\phi}(s, a)$
- 更新 Critic 网络参数 $\phi \mathrel{+}= \alpha \delta(s, a) \frac{\partial{Q_{\phi}(s, a)}}{\partial{\phi}}$
- 更新 Actor 网络参数 $\theta \mathrel{+}= \beta \delta(s, a) \frac{\partial{\log \pi_{\theta}(s, a)}}{\partial{\theta}}$
Deep Deterministic Policy Gradient (DDPG)
Timothy et al. ICLR 2016. Continuous control with deep reinforcement learning.
DDPG = AC + Freeze Target Network + Experience Replay
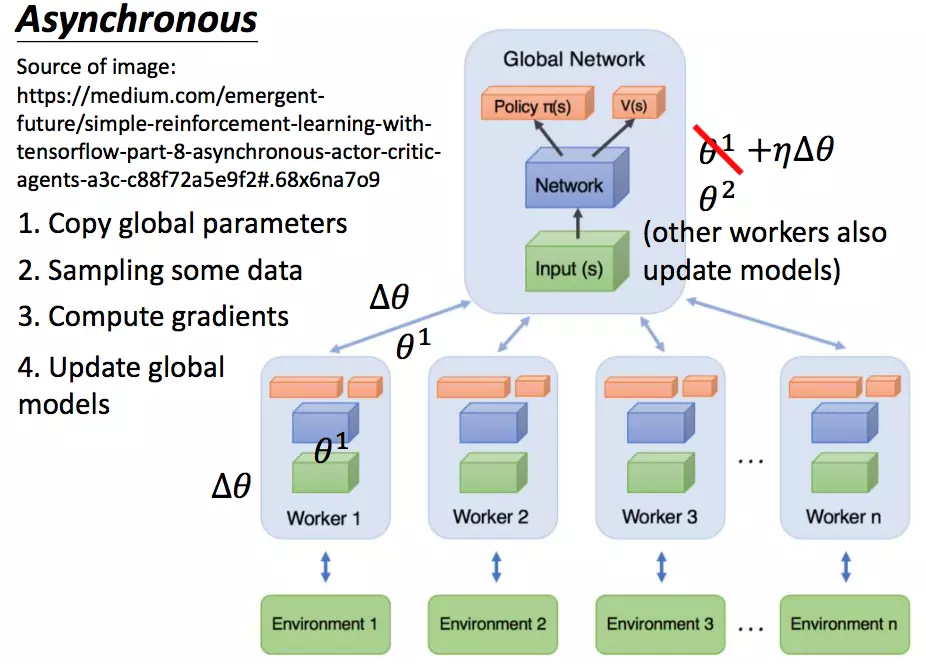
Asynchronous Advantage Actor-Critic (A3C)
Mnih et al. ICML 2016. Asynchronous methods for deep reinforcement learning.
Asynchronous
Advantage
优势函数:A(s, a) = Q(s, a) - V(s) = E(G | s, a) - E(G | s)
策略梯度:$\frac{\partial{EG}}{\partial{\theta}} = E_{s \sim s_0} E_{a \sim \pi_{\theta}(s)}[\frac{\partial{\log\pi(a | s)}}{\partial{\theta}} A(s, a)]$
Dueling Network
Wang et al. ICML 2016. Dueling network architectures for deep reinforcement learning.
n-step
- 1-step: $\delta = r + \gamma \max\limits_{a' \in A} Q_{\phi}(s', a') - Q_{\phi}(s, a)$
- n-step: $\delta = \sum\limits_{t=0}^{n-1} \gamma^t r + \gamma^n \max\limits_{a^{(n)} \in A} Q_{\phi}(s^{(n)}, a^{(n)}) - Q_{\phi}(s, a)$
其它改进
Double Q-learning
van Hasselt, H. NIPS 2010. Double Q-learning.
van Hasselt et al. AAAI 2016. Deep reinforcement learning with double Q-learning.
解藕选择与评估,降低最大化偏差
- Single Q: $Q(s, a) \mathrel{+}= \alpha [r + \gamma Q(s', \mathop{\arg\max}\limits_{a \in A} Q(s', a)) - Q(s, a)]$
- Double Q: $Q_i(s, a) \mathrel{+}= \alpha [r + \gamma Q_{1-i}(s', \mathop{\arg\max}\limits_{a \in A} Q_i(s', a)) - Q_i(s, a)]$ $i \in {0, 1}$
Prioritized Replay
Schaul et al. ICLR 2015. Prioritized experience replay.
改进数据效率:使用优先队列,经验的回放概率正比于误差 $$(|\delta| + e)^a, a \in [0, 1]$$ e, a 的作用分别是提升小误差样本和抑制大误差样本,使取样不极端。
Distributional Q-learning
Bellemare et al. ICML 2017. A distributional perspective on reinforcement learning.
- $E[(G - Q)^2 | s, a]$
- $D_{\text{KL}}(Q | G | s, a)$
Noisy DQN
Fortunato et al. CoRR 2017. Noisy networks for exploration.
- Policy Net: $ a = \phi (s, 1) $
- Noisy Policy Net: $ a = \phi \odot \epsilon (s, 1), \epsilon \sim N(0, 1) $
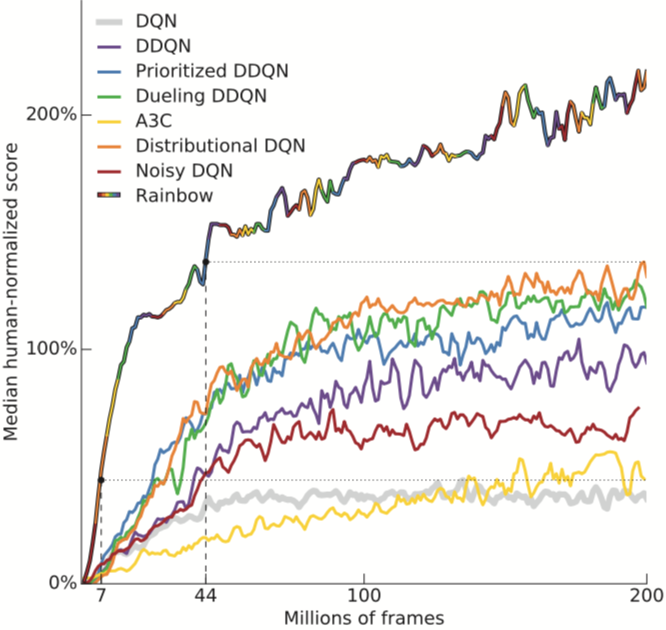
Rainbow
Matteo et al. AAAI 2018. Rainbow: Combining Improvements in Deep Reinforcement Learning.
逆强化学习用于预测
Page Not Found
Try to search through the entire repo.